Building Sentient Robot Civilization on Mars
A thought experiment I was asked to solve in an engineering interview.

During an engineering interview I was asked to build, analyze and complete the design of a sentient robot civilization on Mars that is naturally conscious and self-sustaining. I enjoyed working on this thought experiment and decided to document my solution as explained during the interview.
I was given the luxury to build a genesis robot from scratch on earth using whatever materials that are required and send that robot to Mars. And only with this piece of information I had to complete the thought experiment.
Two fundamental approaches I used were first principles and taking a completely computational view of the universe.
Disclaimer: Since, this was just a thought experiment we can simply assume we are capable of building anything we want as long as we can explain exactly how will it be built and work in reality.
Background
Since, we are taking a completely computational view of the universe, let’s get the glossary straight:
Every agent, be it us humans or these robots on Mars, is essentially an automaton i.e. self-operating machine, or control mechanism designed to automatically follow a sequence of operations, or respond to predetermined instructions.
A terminal goal is the final outcome or destination state every automaton has to ultimately arrive at. Every decision it takes is supposed to take it closer to achieving its terminal goal.
A terminal goal can be broken down into immediate and relatively easily achievable milestones.
Brain is just a computer chip. Be it the human brain or the primary computer embedded inside these Martian robots which controls its entire body and operations.
Genesis Robot
This is the primary robot that we are going to build on earth and send off to Mars. Robot’s structure can be essentially divided into two parts:
The chip which acts as the brain of the robot, and runs it’s mind. This chip is obviously just a computer. Let’s choose any latest silicon processor that is powerful enough.
Rest of the body includes metallic parts, electrical wiring and supporting materials. Let’s assume we can easily build this body comprising of all the parts that we need. We don’t need to explain the mechanics here.
Now things get interesting! 🚀 🔥
Once we land our genesis robot on Mars, we want it to start establishing a society. Before that, the robot needs to decide why and how does it have to do that.
For the why part, we will assign the terminal goal of this robot as to stay alive. Once it knows that it has to stay alive, it will start optimizing on how to do that. For example, it can be hit with a dust storm on Mars and get destroyed. Which goes against the terminal goal of staying alive.
One might wonder, if we really want to this robot to establish a society on Mars, then why shouldn’t the terminal goal be to replicate itself or produce child robots. If the terminal goal is assigned as purely replication, then that is precisely what the robot will keep doing without caring about building the society. For example, it may not invest more in protecting the child robots, or building social defenses, when it can simply replicate. Or why even choose to replicate if it is capable of figuring out other ways to remain immortal? I’ve detailed this idea later in the post.
To make the robot artificially intelligent enough to calculate the how part, we will teach the robot some reinforcement learning (RL). If you are not an engineer, then briefly understand that RL algorithms essentially converge towards their terminal goals by deciding between exploration versus exploitation. They do so using a reward function which gives a reward (a positive score) to the agent every time is chooses the right answer, or doesn’t choose the wrong answer. And consequently a negative score, or no score, if it chooses the wrong answer.
Similarly, the human brain bakes a cookie for you every time you take a correct decision that takes you closer to the intended goal, to signal and motivate you to move ahead in the same direction.
Simple video showing an RL algorithm learning to balance a pendulum after a certain number of iterations.
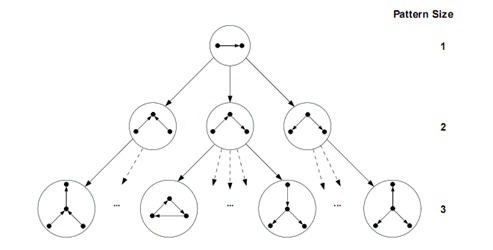
To visualize this more easily, just imagine a decision tree or a graph which is a flowchart-like structure in which each transition is subject to a "test" (e.g. whether a coin flip comes up heads or tails), each branch represents the outcome of the test, and each leaf node represents a decision taken after transition. Something like the below image.
{kind=link}
The reward function will carefully decide whether exploring, or branching out to, a different worldview or exploiting the available worldview is more efficient to achieve the goal. In other words, strategically decide which calculation can be compromised and which ones to double-down upon. This isn’t impossible. Just a lot of work to do.
We are predicting that out of all that this robot will build on Mars, it can also choose to replicate or build child robots (because we are secretly hoping that it builds a sentient society). Therefore, this robot can choose between two broad methods to survive:
Build solutions against physical dangers and scarce resources to remain immortal.
Replicate or give birth to new robots.
The robot doesn’t have to necessarily utilize both the methods every time but we still have to develop the capabilities for both of them. It can autonomously switch between methods as it deems optimal. But before solving for each of the methods, we need to figure out exactly how is the robot going to choose.
To build the capability for the first method doesn’t require a lot of deep thinking. We can just brainstorm and iterate over the finite set of possible physical dangers that the robot can face, for example dust storms, and install pre-trained models in the robot to implement their respective solutions in the physical Martian environment. This can include anything like building disaster resilient infrastructure.
Remember: We are not allowed to send supporting spaceships containing reinforcements or supplies to establish or sustain the colony forward. It’s just the first ride to Mars that contains the genesis robot. So, if you choose the first method, you can send as many supplies as many as you want. But it seems much more optimal to replicate and give birth to new robots similar to an amoeba. And don’t start building additional physical infrastructure that isn’t meant particularly for giving births, until you have enough child robots to start building a colony.
But we still have to train the robot for the second method i.e. replication, in case it deems it fit anytime throughout it’s lifetime. So now, the thought experiment is how to build a complete colony of these robots.
Building Child Robots
Remember, each child robot must be able to perform all operations that the genesis robot can. So, our child robot essentially comprises of:
Ability to build physical infrastructure.
Ability to replicate itself further.
A terminal goal i.e. to stay alive.
To build a child robot on Mars, the genesis robot will have to solve two problems using only the resources available on Mars:
Build the physical mechanical body of the child robot.
Build the chip of the child robot. Exactly like the structure of genesis robot, this chip is the brain of our child robot and implements it’s mind.
As far as the physical body is concerned, we can simply hard-code its structural blueprint, aka the its DNA, into the genesis robot and have it gather the materials and resources on Mars to build the body. Similar to how our human DNA contains our structural blueprint. For example, use Mars dust (random equivalent of Moon dust) and arrange it in a structure to complete the physical body. It obviously has to do it with a lot of sophistication, but that isn’t our problem for now. As long as we know how the building blocks of this mechanical structure work, we can continue with our design experiment without worrying about it’s implementation.
Also, the brain-chip of the child robot might not be completely identical to that of parent robot. It will be everything that the parent’s chip is, but possibly much more. Because every robot will self-correct, memorize decisions in cache, build new models, optimize existing ones, and generally learn new stuff and would want to pass it on to their children.
But how can our genesis robot design the brain-chip for the child robot on Mars? 🤔
So, now we have to practically build a computer using only the resources available on Mars. This is where things get even more interesting! 🔥
Ludwig Wittgenstein was an Austrian-British philosopher and mathematician, widely regarded as one of the finest minds in the field of computation in 20th century.
After coming back from the first world war, Wittgenstein achieved a major feat. He had built a completely functional computer using nothing but NAND gates. This computer could process all formal logic that was required to make a functionally complete machine.
In case you are not an engineer, let me quickly explain “NAND gates.” The electronic chips/processors of your computers use something called “logic gates“ made of transistors and junction diodes to process logic. You basically give them an input (either 0 or 1) and they generate an output (again, as 0 or 1). Three important logic gates are represented in the image below. You can see their inputs and outputs. We can use a combination of these gates to build a functional computer that can process all the logic that we want.
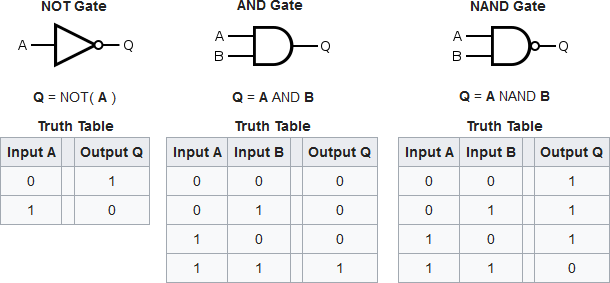
The NAND gate is significant because any boolean (true/false) function can be implemented by using a combination of NAND gates. This property is called functional completeness.
And since Wittgenstein had done his magic, we can safely go ahead and decide that we can come up with an architecture comprising only of NAND gates to build a completely functional computer that can process all formal logic.
Once we have our brain’s architecture, all we need is an energy source (e.g. electricity on earth) to activate and power this architecture. Alas! Now we have a functional computer that can process all formal logic. And that forms the brain-chip of our child robot.
Brain-chip = architectural blueprint made of NAND gates + energy source
We will hard-code and save this architecture’s blueprint into our genesis robot so that it can simply imprint it precisely to build it physically on the ground. Similar to how 3D printers work here on earth. But how will this happen?
We can broadly choose two strategies for the brains of our child robots:
Build an external shared chip that is used by multiple robots as a centralized brain. In this case, our genesis robot will only fabricate the brain-chip once. And just building multiple physical bodies connected to this existing external brain will amount to ”replication” or “reproduction.“ In this case, we aren’t building intelligent individual robots. Just a hyper-organism with a centralized brain.
Embed a new chip inside every child. Like every human child gets his/her own brain.
In the first approach, our colony comprising of multiple robots will function in a similar way as we consider our mobile phones and laptops as an extension to a centralized brain i.e. the internet.
Regardless of which approach we take, let’s discuss how to power these brain-chips. On earth we have electricity to power the transistors and diodes that form our NAND gates, and by extension our silicon chips. But not on Mars.
Let’s be slightly playful over here. We do know that Mars has ice. So, maybe we can teach the genesis robot to melt the ice and use water as an energy source to power the chip. Maybe by directing and targeting the liquid flow to spark the NAND gates, like we build irrigation systems on earth, and using Martian dust as fabrication material for synthesizing the chips.
Assuming the genesis robot can decide to use the second strategy i.e. building individual brains, we need to teach the genesis robot to build these chips down to the measurements of a few nanometres with sophistication, like our present day silicon chips, so that individual chips can be installed inside every child robot.
Now that we’ve successfully built a functional child robot, including both the body and the chip, let’s define “operating system.” Exactly like our smartphones and laptops, the OS is the software that runs our robot. It interacts with and controls all the parts of our machine using the source code in its chip.
Interestingly, the human equivalent of this operating system is what we call “spirit.” I think our ancestors were not able to build robots from scratch (obviously!), but they did ponder about how all our body parts, along with the mind, might be interacting to remain in sync and achieve stability. And they described it as the spirit. And this spirit can also be transferred to other bodies/robots. I do think that “operating system” is just a mis-translation of the word “spirit“ from our ancestors’ glossary.
In later posts, I will explain how these robots will build their own perception and achieve consciousness.
Going From Individual To Groups To Society
Now that we have multiple robots/agents each with the terminal goal as staying alive, these agents can choose to either collaborate or compete.
One might presume that initially, during low populations, collaboration trumps competition in efficiency subject to terminal goal. As we discussed a while back, the intention of efficiency from collaborating, or multiplying force, might be the reason behind the genesis robot choosing to replicate in the first place instead of working solo.
In order to efficiently collaborate, these agents will also develop and decide their own consensus protocols.
Once population grows, each agent will start optimizing whom to collaborate with to converge faster towards its own terminal goal. And this optimization gives birth to competition.
In the process, these agents will also calculate and decide immediate milestones. All of which should eventually lead up to their terminal goals. But altering the terminal goal is not possible. The most super-intelligent thing that any agent can ever do is hack its own reward function. No decision can be classified as more intelligent than that.
Once, different groups of robots start competing they would want to preserve their own functions, models, methods, scores, agents and institutions. Why? Because it’s efficient.
There will be times when a group collectively decides that it is more efficient to hijack another group’s achievements or project, and now we have a war. And once these groups agree on certain consensus protocols and hierarchies, we get an organization.
We can safely conclude the thought experiment over here. From here on, having the pendulum efficiently swing between collaboration vs competition, and exploration vs exploitation, these agents can build and maintain their own social structures.
In later posts, I will explain how these social structures are constructed in a computational universe, and how do we go from organization to culture to society to a sentient civilization.
“If this is how human civilization came into being, then where does our architectural blueprint, aka the DNA, come from? Did God create the first human? 🤔“
Good question. Answer is - from evolution. And no, God definitely did not create humans 🤡
Ending note: If the genesis robot somehow gets destroyed, we won’t really consider it dead. Because by now, it has turned into a hyper-organism. Similar to how the first cell on earth never died. It just kept replicating and turned into a hyper-organism. And all of us are now a part of that hyper-organism. Mind you, we are not a product of it. We are a part of it.